

Gamme de produits

Papua New Guinea Valeur absolue creuse ultra-mince
Classification:
Papua New GuineaCodeur inductif
Produits


▋ Codeur à double sortie de la série ADK-DIA
Modèle:
1) Les valeurs incrémentales et absolues sont émises de manière synchrone afin de réaliser une mesure simultanée de la boucle de vitesse et de la boucle de position. Le signal différentiel incrémental est envoyé au convertisseur pour le retour de vitesse et le signal de valeur absolue est envoyé à l'automate pour le retour de position.
2) Deux systèmes totalement indépendants émettent la même impulsion pour répondre à des exigences de mesure et de contrôle très fiables, comme dans les aciéries, etc., afin de garantir que les données sont absolument fiables et adaptées à des environnements difficiles.
3) Des paramètres spécifiques peuvent être personnalisés.
4) Taille du corps : 58 mm ; taille de l'arbre : 10 mm ;
5) Résolution de la sortie incrémentale push-pull : Max 4096ppr ; Encodeur absolu Modbus : Max 16384ppr ;
● Paramètres électriques
| Tension | DC24V, 8-30V |
| Méthode de sortie | 1 Sortie absolue Modbus ; 2 Incrément : N : sortie NPN C : NPN ouvert R : Sortie PNP U : PNP set open output L : long line drive E : voltage output P : complementary push-pull output ; |
| Fréquence de réponse maximale | 150Khz |
| Consommation maximale de courant | 80mA ; 150mA(sortie ligne longue) |
| Courant de charge | 40mA ; 60mA(sortie ligne longue) |
| Niveau de sortie haut |
Min Vcc x 70%(sortie collecteur) Min Vcc - 2.5V(Voltage output) Min 3.4V(Long line output) |
| Niveau de sortie bas | Max 0.4V |
| Temps de montée/descente Tr/Tf | Max 1μs, Max 200ns (sortie ligne longue) |
● Paramètres mécaniques
| Couple de démarrage | <0.03Nm |
| Charge maximale sur l'arbre | Radial : 50N ; Axial : 20N |
| Vitesse maximale | 5000rpm |
| Moment d'inertie | 4 x 10^(-8)kg.m2 |
| Poids net | 120g |
● Paramètres environnementaux
| Température de fonctionnement | -25℃-80℃ |
| Température de stockage | 30℃-80℃ |
| Résistance aux chocs | 50G/11ms |
| Anti-vibration | 10G 10-2000HZ |
| Niveau de protection | IP54 |
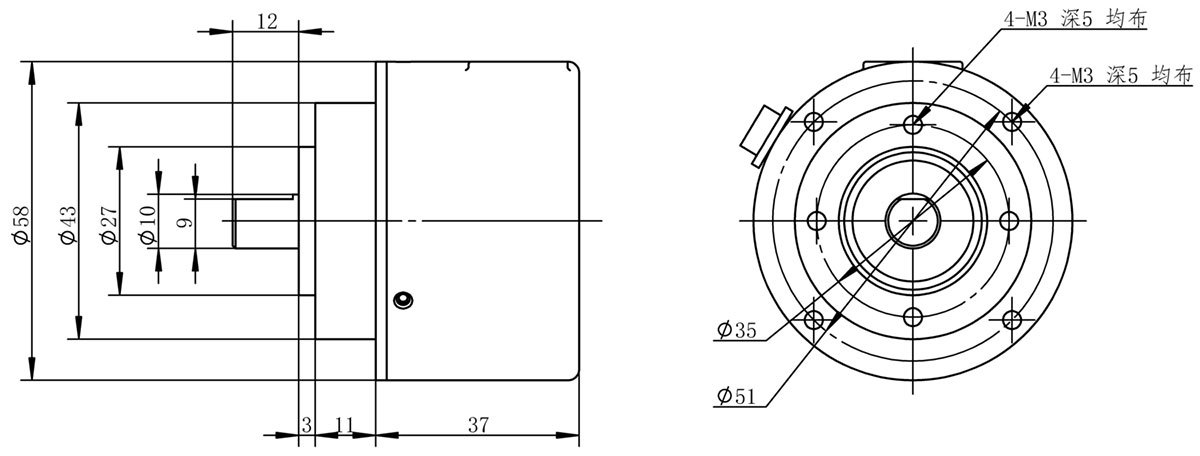
● Dessin des dimensions mécaniques
Il s'agit d'une entreprise nationale de haute technologie spécialisée dans la recherche et le développement, la production et la vente de codeurs rotatifs industriels.
Add:Building 1, North District, Zhongke Innovation Industrial Park, Economic Zone, Weihai City